
Humans, but not only humans, perceive the world in three dimensions, or more precisely they perceive a world populated by solid shapes. This is possible because of a number of cues to depth. Traditionally these cues have been divided in binocular, such as binocular disparity, and monocular.
Perhaps not surprising, given the obvious adaptive advantage, a variety of information is used by the visual system to perceive depth. A quick list of the monocular cues includes: Motion parallax, Height in the visual field, Perspective, Relative size, Atmospheric perspective, Focus and Occlusion.
It is not often that a new cue is added to this list, but with our research we have done just that. We can call this depth from reflection. When objects are reflected on a specular surface, such as a flat mirror, the relationship between object and its image is informative about the distance of the object from the mirror surface. If more than one pair of object-reflection is available, relative distance and relative size information is available. We explain this below, first let us look at an example.
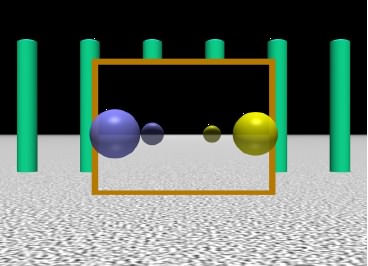
A blue and a yellow semitransparent sphere are floating at eye-height in front of a mirror. The terrain has a noisy texture that provides slant information but no familiar size. The relative distance from the observer and therefore also the relative height of the two objects is specified by the relationship between the image of the sphere and the image of the virtual sphere.
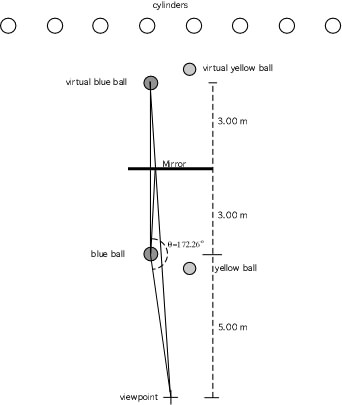
Plan view of scene layout. Note that the distances are given in meters, but scale is arbitrary.
It is useful to think of the real object (target) and the virtual object as a pair of visible objects.
That the virtual object inhabits a virtual world is irrelevant with respect to visual information. The important point is that a real target and a virtual target inside a mirror are objects of exactly the same physical size. Therefore the ratio between the heights of their two images (r = image/image') is inversely related to the ratio between their two distances from the same vantage point (r = d'/d). We define k as the distance between the object and the surface of the mirror. The distance of the virtual object is the distance of the real object plus twice k. This is because the virtual target is always at the same distance inside the mirror as the real target is from the mirror. From this we derive the relationship between d and k.
r = 2k/d +1, d = 2k/(r - 1)
When the mirror is not aligned with the target we need to know the angle theta. A few steps let us express r (as before) as the ratio between the distances from the vantage point to the virtual and the real target.
d = 2k (r - cos theta¸) / (r2 - 1)
This formula is more general, and when theta=180 deg the simpler version can be derived. Moreover, for small deviations from alignment, the simplle formula is a good approximation.
This relationship is of limited importance with respect to absolute distance and absolute size because it still requires knowledge of the unknown distance k. Relative distance and relative size on the other hand are fundamentally different. Relative information is available even without knowing k.
This research was made possible by a Grant from the ESRC
Reference:
Jones, L. & Bertamini, M. (2007). Deep Reflections: How the relationship between an object and its reflection affects the perception of distance and size. Perception, 36, 1572-1594 file.